
Высокие технологии
В последнее время в условиях расширения мирохозяйственных связей всё более значительное место в развитии общества занимает его информатизация. Информационные технологии, степень их освоения и практического использования, а также обеспечивающая их телекоммуникационная инфраструктура становятся важнейшими факторами экономического прогресса, обеспечивая стабильно высокие темпы развития отдельной страны и эффективность её интеграции в мировую экономику.
Дальневосточный государственный университет путей сообщения является одним из крупнейших образовательных учреждений, которое готовит IT-специалистов. Исследовательский охват получают такие области как информатика, разработка программного обеспечения, робототехника, телекоммуникации, электроника, беспроводные технологии, компьютерная графика и прототипирование.
Робототехника
Робототехника – одно из перспективнейших направлений в сфере интернет-технологий, а то, что за ИТ-сферой – будущее, в наше время и объяснять не надо. Робототехника служит инструментом для углубленного изучения таких дисциплин, как информатика, физика и технология. Сконструировать робота – значит почти что создать новое существо, пусть и электронное.
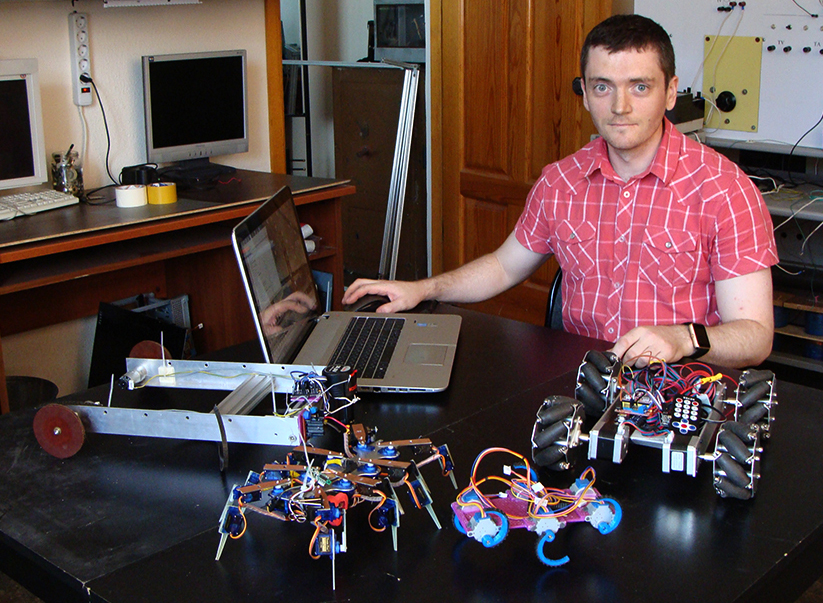
Работа с автоматизированными устройствами контроля, защиты и мониторинга требует компетенций в создании и программировании сложных автономно работающих устройств. Одним из наиболее близких направлений является робототехника. В лаборатории вуза идет проектирование и создание различных моделей роботов. К работе активно привлекаются студенты.
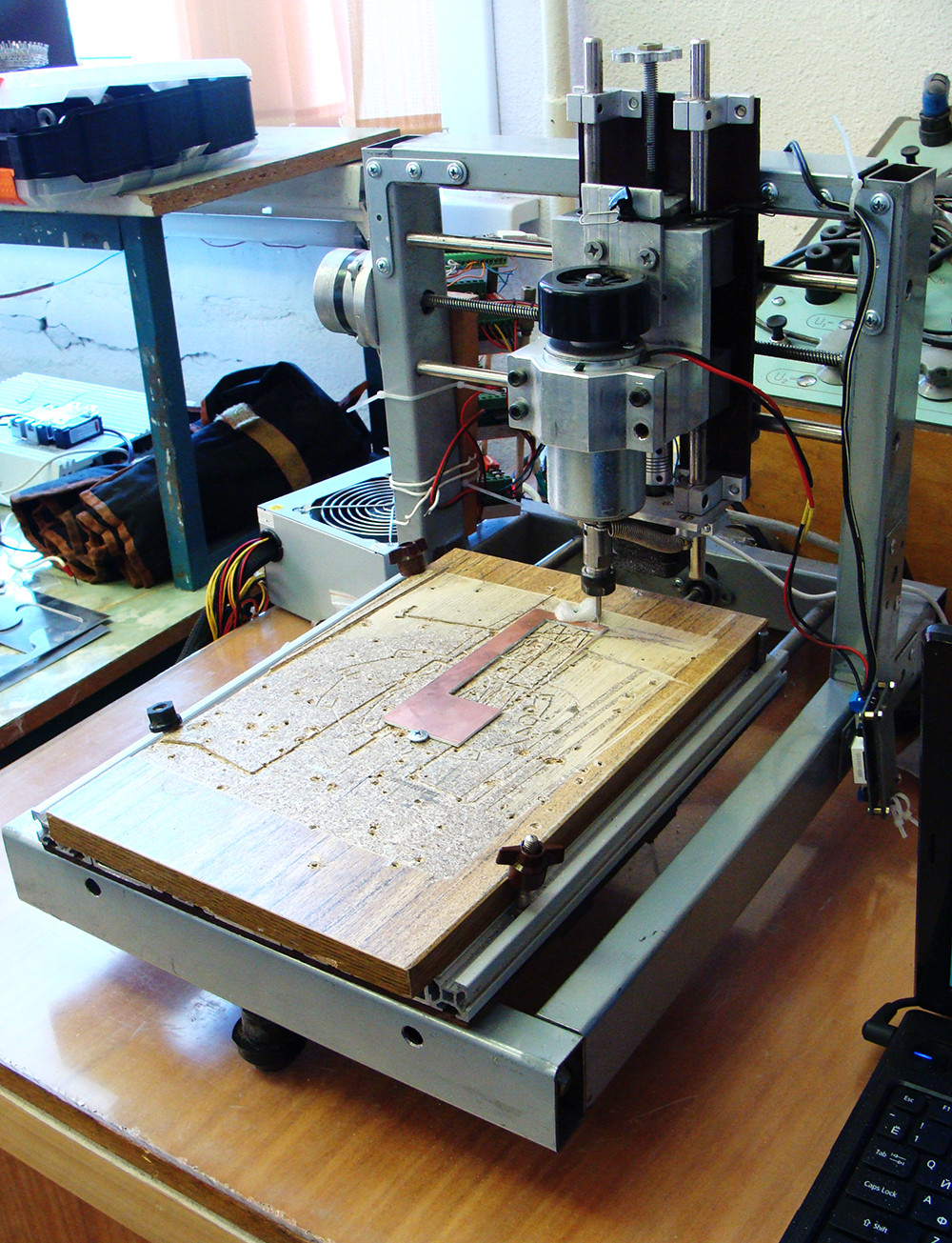
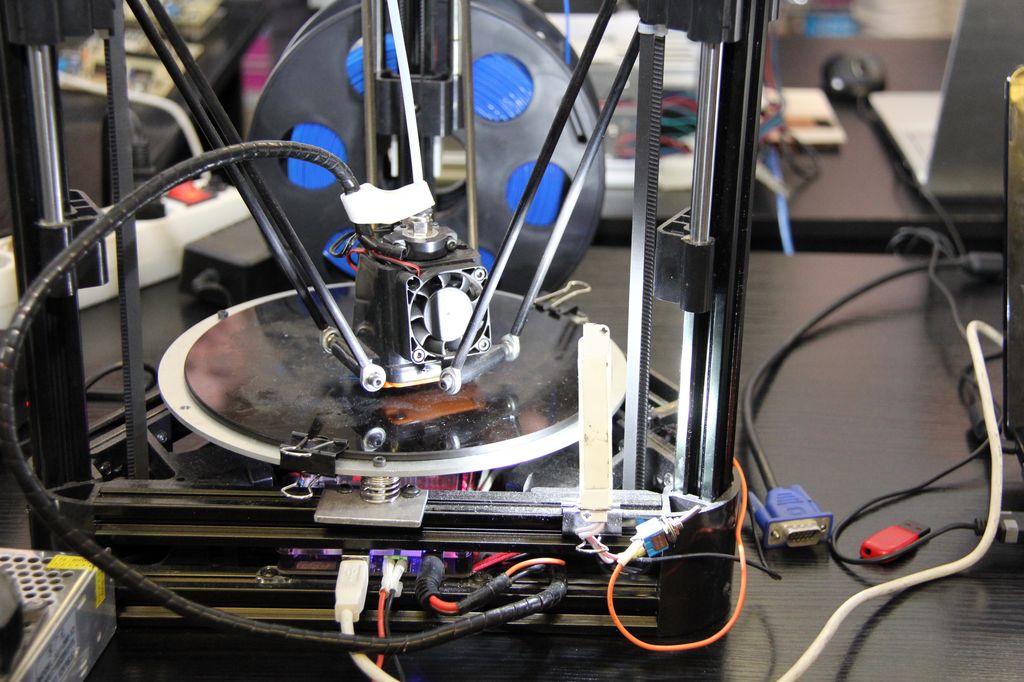
Компоненты приборов, узлы и детали, корпусные части, печатные платы создаются на станке с ЧПУ, самостоятельно сконструированном преподавателем ДВГУПС Тряпкиным Евгением Юрьевичем. Работает станок под управлением платы Arduino Nano. Конфигурации станка достаточно для обработки деталей из цветных металлов, дерева, текстолита и других материалов. Площадь обрабатываемой поверхности составляет форму листа А4.
{kind=link}
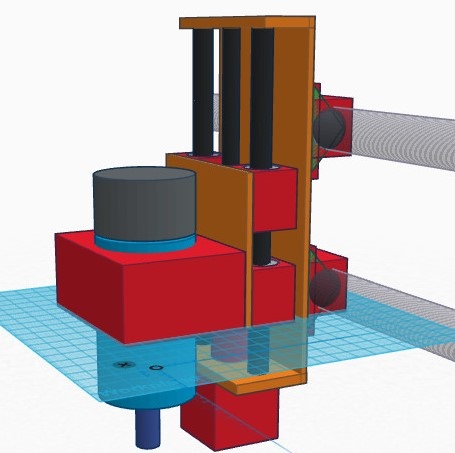
Для обработки сложных трехмерных объектов добавляется четвертая поворотная ось. Часть станка спроектирована в графической среде, некоторые сложные узлы распечатаны на принтере. Локализация производства необходимых компонентов и деталей в одной лаборатории значительно ускоряет процесс создания оборудования. Время от начала проектирования изделия до готового образца составляет обычно не более часа.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Robot hexapod (RHex)
RHex – одна из самых удачных конструкций небольших шестиногих роботов. Его ноги не имеют суставов и представляют собой дугообразные элементы, которые вращаются вокруг своей оси, так что подвижность робота обеспечивают всего шесть электродвигателей. Для линейного перемещения робота достаточно 2 каналов управления, по 3 ноги на каждом. С этой задачей справится одна плата Arduino. Конструкция робота такова, что на поверхности остаются не менее 3 ног при ходьбе, что позволяет сохранять устойчивость, также робот обладает высокой проходимостью. При корректировке программного обеспечения и изменении формы ног робот способен плавать.
Рама робота и конечности спроектированы специальной программе для создания CAD объектов, и распечатаны на 3D принтере. Для придания требуемой жесткости рама дополнительно укреплена эпоксидной смолой. В движение RHex приводится шаговыми двигателями с высоким крутящим моментом. Это позволяет RHex транспортировать большую полезную нагрузку.
{kind=link}
{kind=link}
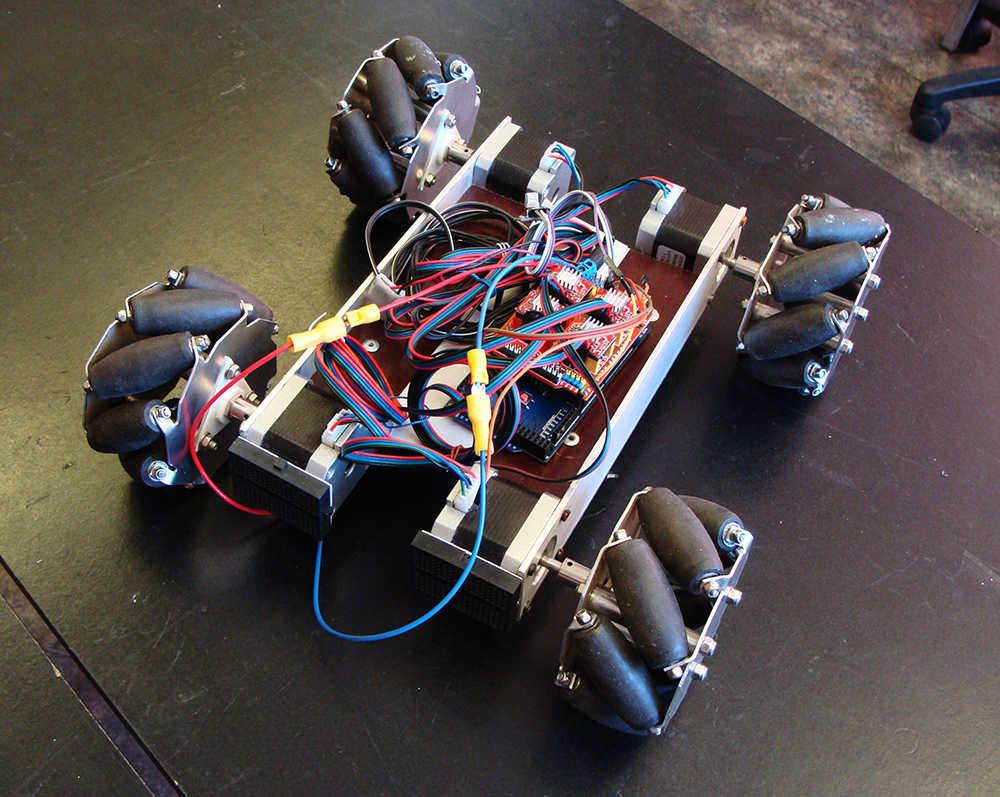
Всенаправленная роботизированная платформа
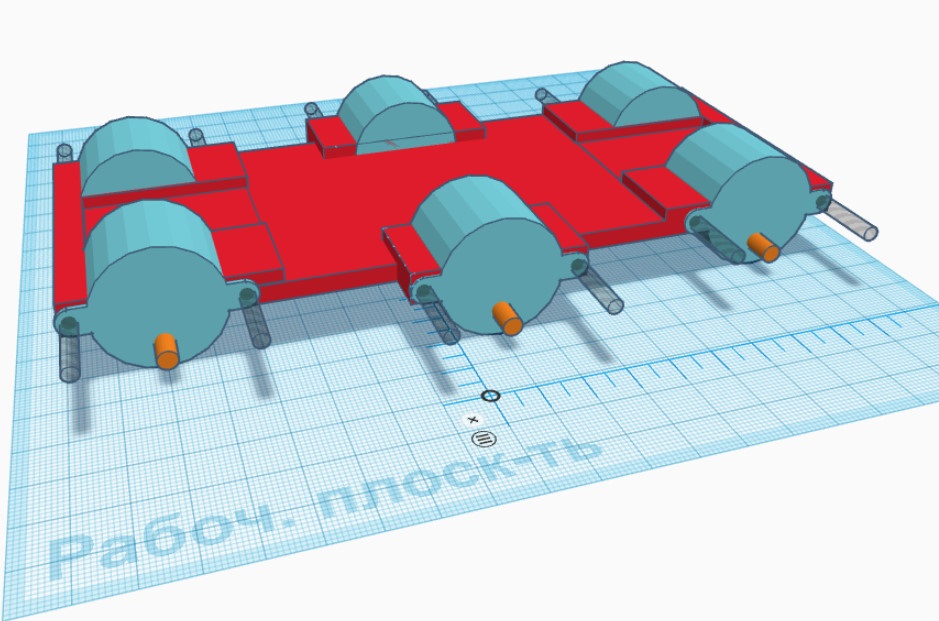
Всенаправленная роботизированная платформа использует колесо Илона, известное также как шведское колесо. Конструкция представляет собой колесо, на котором смонтировано несколько роликов, установленных на протяжении всей окружности колеса. Угол вращения роликов составляет 45° между ними и осью колеса. Путём изменения направления вращения роликов на отдельных колёсах или задействуя все колёса сразу, можно заставить робота, оснащённого илоновыми колёсами, двигаться в любом направлении – не только вправо-влево, вперёд-назад, но и диагонально.
Резиновая основа роликов изготовлена на ЧПУ станке, для чего на нем была смонтирована 4-я поворотная ось. Диски колес изготовлены на станке ЧПУ из листового алюминия. Для надежности крепления колес к двигателям были напечатаны специальные фиксаторы из ABS пластика. Для апробации шасси использованы 4 шаговых двигателя с драйверами, Алгоритмом управления вращения колес занимается плата Arduino MEGA 2560. Роботизированная платформа осуществляет движение в 10 направлениях. Платформа показала высокие показатели устойчивости, скорости, точности передвижения. Дальнейшим шагом развития данного направления является перенос задач управления на более производительную платформу (NI MyRIO, NI SbRIO, Risberry) с реализацией системы машинного зрения и применения беспроводной сети в алгоритмах управления движением робота.
{kind=link}
{kind=link}
{kind=link}
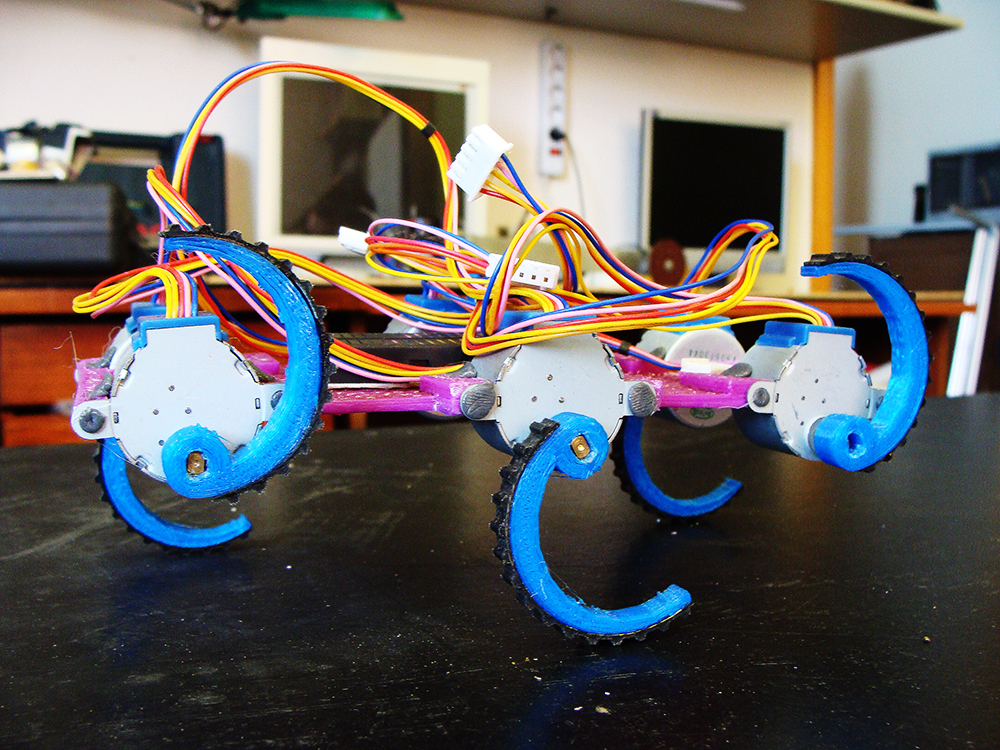
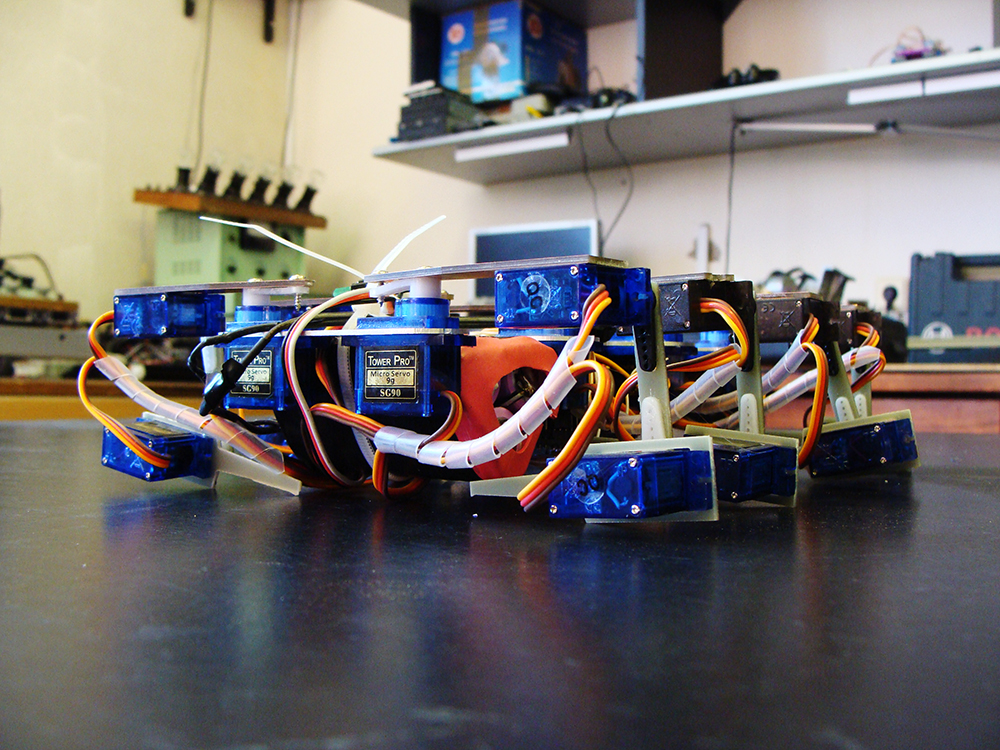
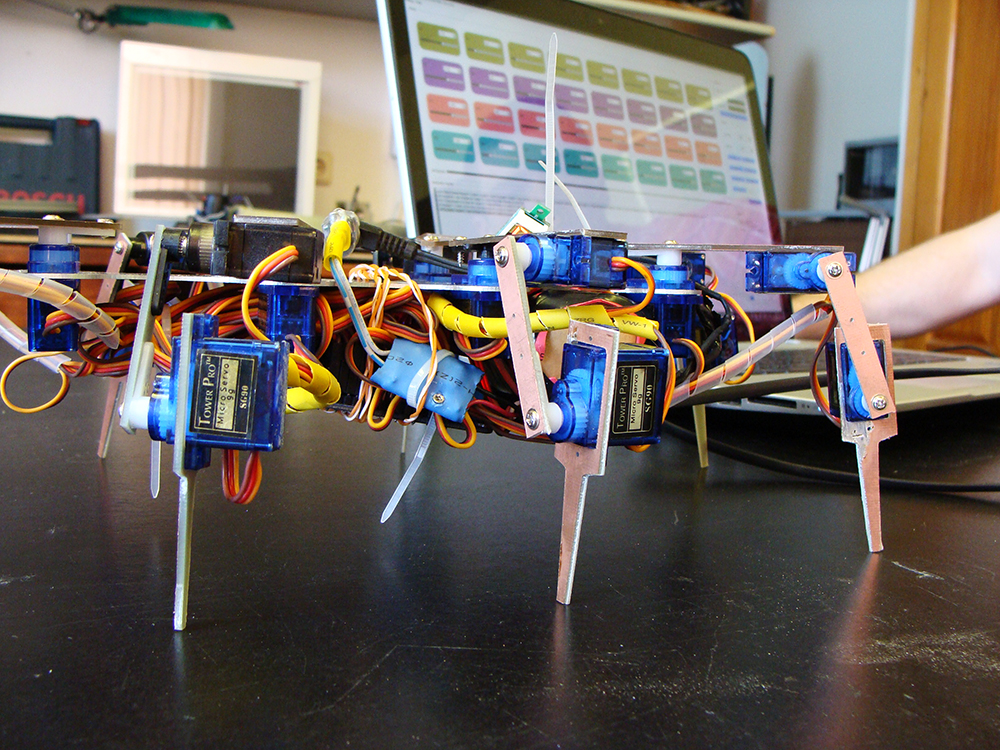
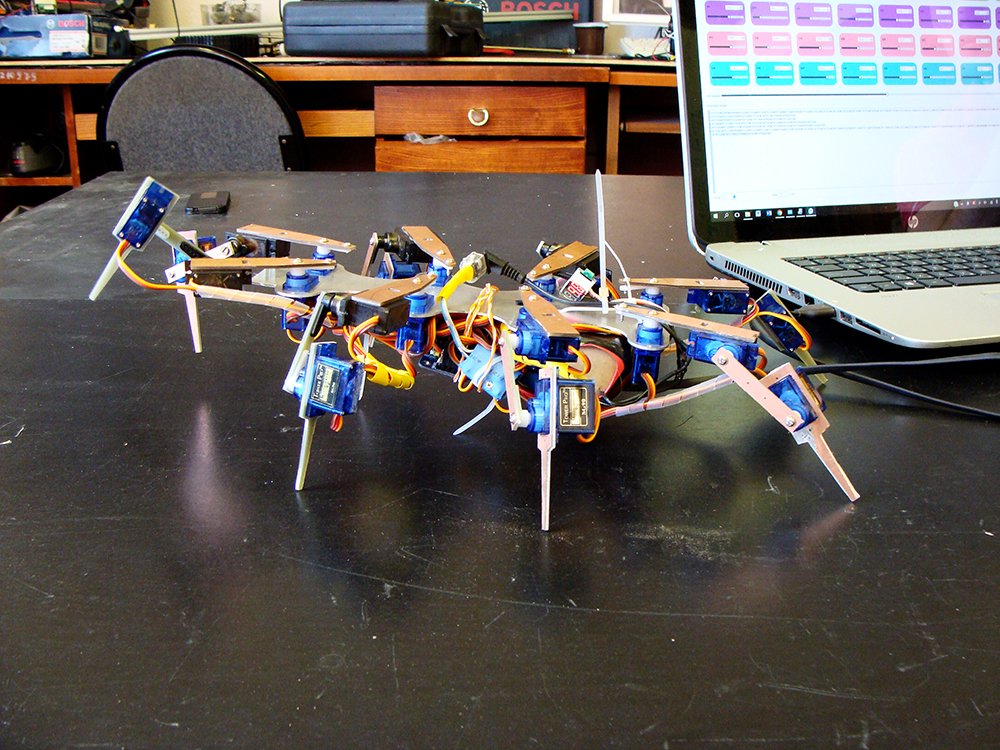
Робот-паук (Octopod)
Робот-паук представляет собой робота с 8 ногами, каждая из которых имеет 3 степени свободы. В движение робот приводится сервоприводами, всего их необходимо 24 шт. Для движения робота достаточно задействовать 6 ног, а две оставшиеся задействовать для захвата предметов или иных целей. При этом Octopod по функционалу, а также допустимой полезной нагрузкой опережает более распространенный 6-ногий Hexapod.
Для максимального снижения собственного веса робота рама и конечности изготовлены их облегченных материалов на ЧПУ станке. Рама изготовлена из листового алюминия. Элементы конечностей выполнены из металлизированного стеклопластика.
Движением робота управляет плата 32servo RTRobot. Каждое изменение положения конечностей робота (кадр) записывается в память платы. Движение представляет собой чередование кадров. Робот способен имитировать движения и действия многих членистоногих (крабы, пауки, муравьи и др.). Для расширения функций робота могут устанавливаться челюсти. Невысокая скорость передвижения, малая грузоподъёмность и высокая энергозатратность робота компенсируется огромным количеством вариантов его действий.
{kind=link}
{kind=link}
{kind=link}
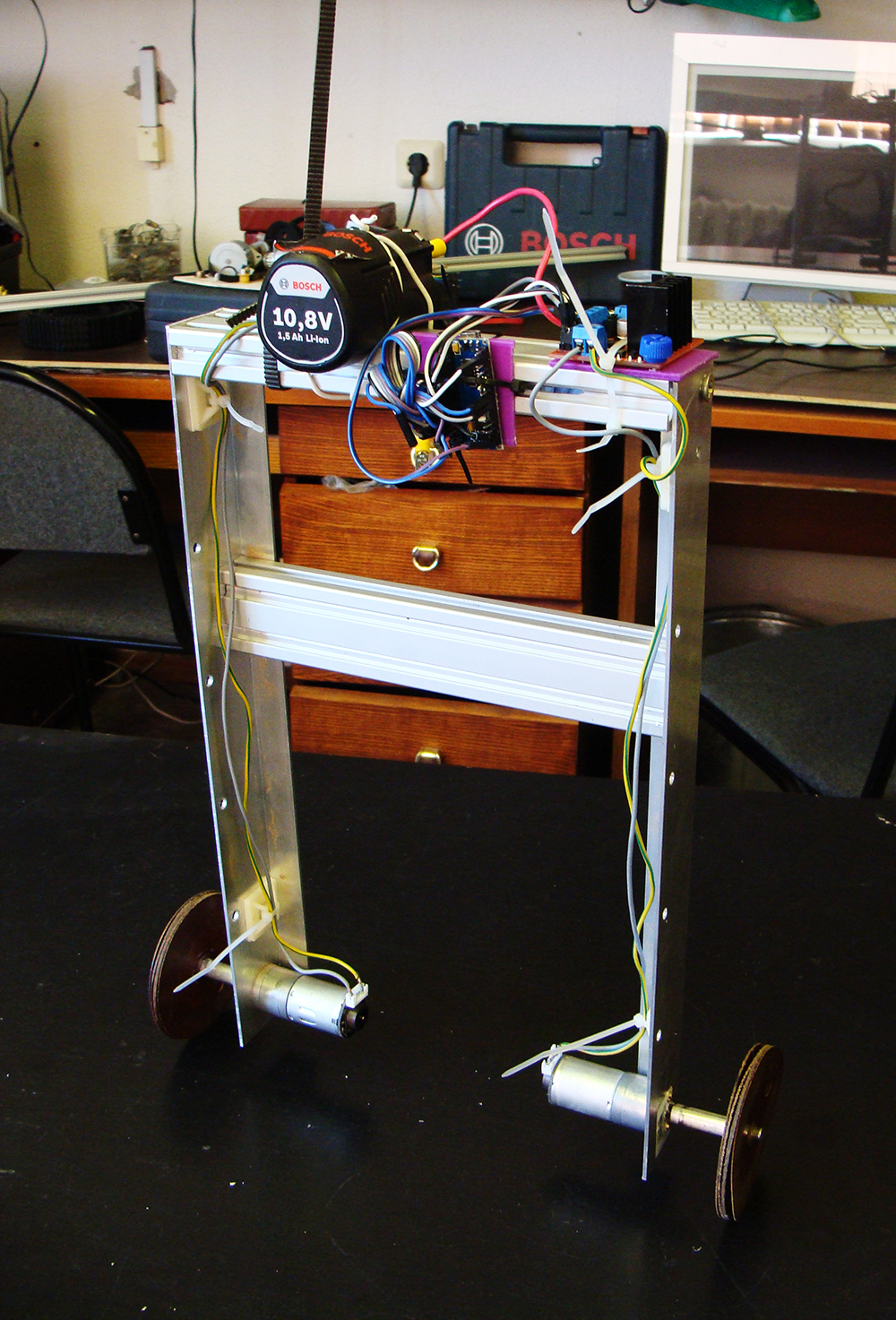
Балансирующий робот
Балансирующий робот является наиболее сложным в управлении. Его особенностью является отсутствие статичной устойчивой опоры, а его устойчивое положение и перемещение представляет собой результат постоянного контроля движения колес, которых у робота два. Для определения положения в пространстве использован комбинированный модуль гироскопа и акселерометра. Для исключения погрешности этих датчиков применен математический фильтр. Для управления роботом применена плата Arduino Uno, воздействующая посредством ШИМ на двигатели колес. Для решения задачи управления моментом вращения колес робота применен ПИД регулятор. Однако для повышения устойчивости робота возможно применять и иные алгоритмы управления.
Робот собран из алюминиевого профиля. Центр массы робота находится в верхней его части значительно выше оси вращения колес. В движение робот приводится двумя мотор-редукторами.
По сравнению с иными способами передвижения балансирующие роботы являются наиболее энергоэффективными, способны переносить значительный вес. Однако препятствия на пути робота способны привести к потере устойчивости и падению.
{kind=link}
САПР и прототипирование
В ДВГУПС действует лаборатория «САПР и прототипирование». На 3D-принтерах студенты занимаются моделированием, представляя результаты своей научно-исследовательской работы на конкурсах, олимпиадах, чемпионатах, и учавствуя в организации курсов по 3D моделированию.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Курсы по 3D моделированию в ДВГУПС для школьников
С 2016 года в ДВГУПС действуют курсы по 3D моделированию для учащихся 10-11 классов, на которых будущие инженеры:
- изучают работу с программными комплексами Компас-3D, Autodesk Inventor и Autodesk 3DMax;
- учатся моделировать трехмерные модели в современных программных комплексах;
- получают навыки инженера-конструктора;
- учатся читать чертежи.
Инженерная и компьютерная графика
Область деятельности, в которой компьютеры наряду со специальным программным обеспечением используются в качестве инструмента, как для создания и редактирования изображений, так и для оцифровки визуальной информации, актуальна в подготовке IT-специалистов в ДВГУПС.
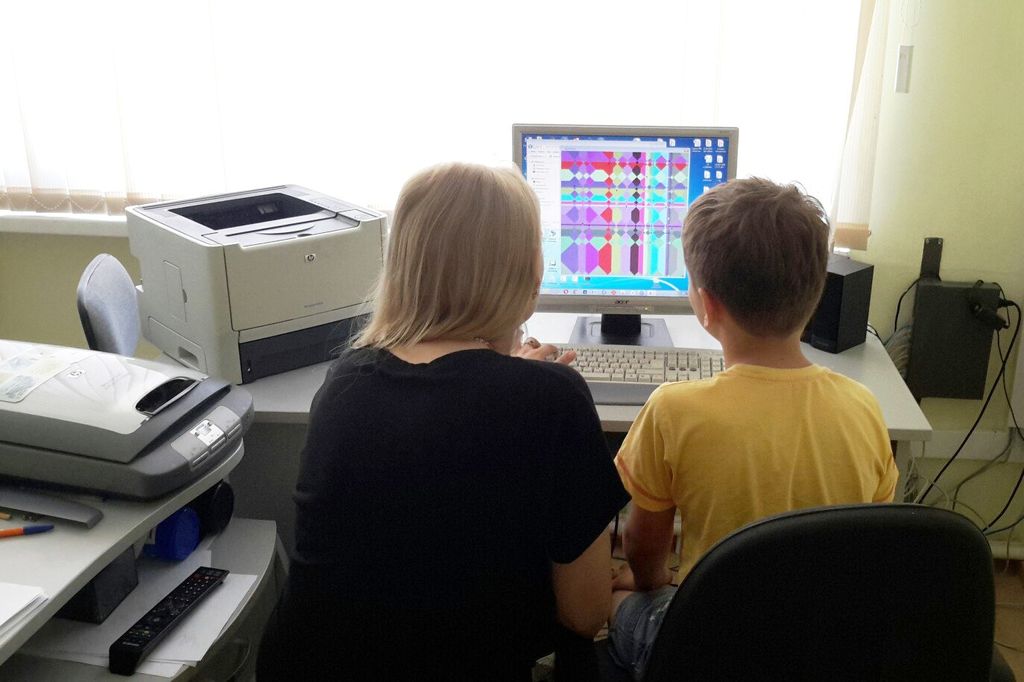
Содействие программе непрерывного образования: работа со школьниками
ДВГУПС активно сотрудничает с детским центром «Созвездие» – студенты и преподаватели кафедры «Вычислительная техника и компьютерная графика» принимают участие в профильных сменах, а также проводят мастер-классы по направлениям: инженерная и компьютерная графика, робототехника.
Куратором серии проведенных мастер-классов является преподаватель кафедры ВТиКГ Холодилов А.А.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Занятия от представителей ДВГУПС в КЦДО «Созвездие»
Мастер-классы для школьников в центре «Созвездие» продолжаются
Представители ДВГУПС завершили работу на летних профильных сменах в КЦДО «Созвездие»
Представители ДВГУПС – ведущие мастер-классов в КЦДО «Созвездие»
Представители ДВГУПС провели очередную серию мастер-классов в КЦДО «Созвездие»
Представители ДВГУПС провели мастер-классы в КЦДО «Созвездие»
Преподаватели ДВГУПС – эксперты профориентационной смены «Созвездие Skills»
Техношкола в Математическом лицее
На базе МАОУ Математического лицея города Хабаровска осуществляется проект «ТехноШкола»: проводятся мастер-классы и открыты лаборатории под руководством студентов и преподавателей ДВГУПС.
В проекте принимают активное участие следующие преподаватели и студенты кафедры ВТиКГ:
- Пономарчук Ю.В. (руководитель лаборатории «IT-школа Samsung»);
- Суриц В.В. (руководитель лаборатории «3-х мерное моделирование в 3ds max»);
- Исаев М.С. (руководитель лаборатории «Вывод цифровых 3-х мерных моделей в реальный мир посредством ЧПУ»);
- Лукашевич В.С. (руководитель лаборатории «Инженерное проектирование CAD»);
- Ким Е.Д. (руководитель лаборатории «Видеомонтаж и моушн дизайн»);
- Нащочин Е.О. (руководитель физической лаборатории и лаборатории «Электроника»);
- Усманов А.А. (руководитель лаборатории «Олимпиадное программирование»).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Конференции и форумы
Студенты ДВГУПС принимают активное участие в конференциях и форумах:
- Научно – техническая конференция молодёжи ОАО АК «Транснефть-Дальний восток»;
- 6-ая научная конференция с международным участием «Информационные технологии и системы 2017»;
- Международные научные конференции в издательстве «Мир науки» (заочное);
- Научное техническое и социально-экономическое развитее транспорта и промышленности стран АТР;
- Конференция Интеллектуальные потенциал молодёжи Дальневосточному региону;
- АСИР, Инвестиционная бизнес-презентация инновационных проектов;
- Форум Амур;
- Проведение научно-технической выставки в рамках форума «Интеллектуальные потенциал молодёжи Дальневосточному региону»;
- Зимняя школа фонда Сколково;
- АСИР, Выставка инновационной продукции в Хабаровске.
Представители ДВГУПС приняли участие в международной конференции
Магистр ДВГУПС принял участие в работе Открытого университета Сколково